Optical fibre gripper for high-performance 3D micromanipulation
Abstract
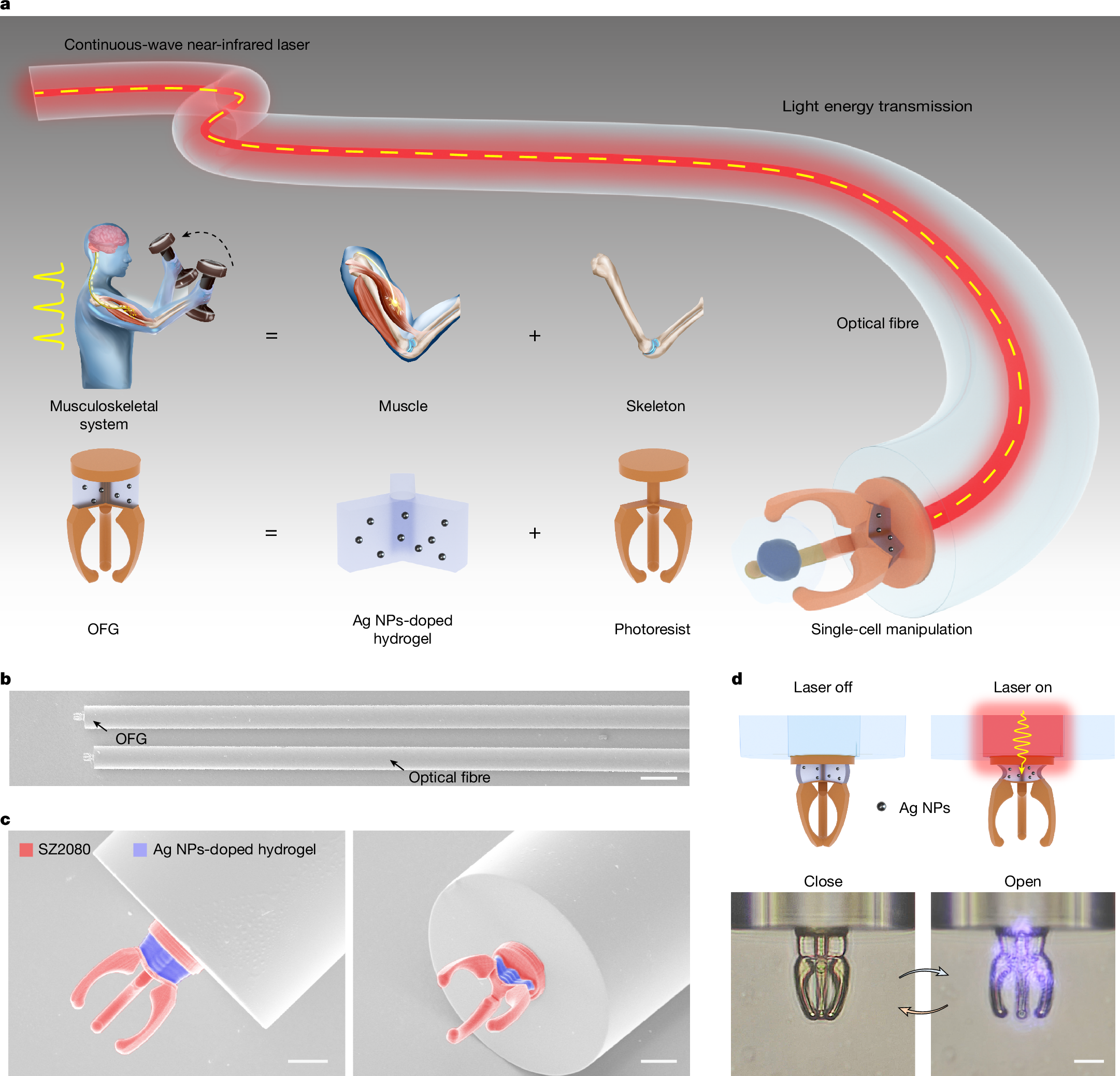
Optical tweezers offer precise, non-contact control, but operate in a limited force regime and impose strict requirements on the characteristics of the targets as well as the environmental conditions1,2,3,4. Millimetre-scale mechanical tweezers can offer higher gripping force but are not suitable for precise manipulations5,6,7,8,9,10,11. Integrating microgrippers directly at the optical fibres provides a new approach for precise micromanipulation. However, existing fibre-integrated tweezers still face challenges in achieving high-performance manipulation of micro-objects (for example, single cells) within narrow spaces, mainly due to simplified architectures, constrained designs and millimetre-scale footprints12,13,14. Here we report a three-dimensional (3D) optical fibre gripper (OFG), which is fabricated by two-step, two-photon polymerization. The OFG consists of rigid photoresist microclaws and soft thermoresponsive hydrogel muscle doped with silver nanoparticles, and its size is only 38 × 38 × 61 μm3. The OFG exhibits a force-to-mass ratio of about 340 μN mg−1, outperforming previously reported fibre-integrated tweezers by one to two orders of magnitude. The OFG can manipulate opaque particles, irregular micromechanical components and diverse single-cell types. We further demonstrated its potential in 3D microassembly of complex microdevices (bearings, shafts and gearboxes) and biomimetic sampling in the narrow environment (<300 μm). These results position the OFG as a compact fibre-tip manipulator for 3D micromanipulation, offering reversible and tunable gripping in an intermediate force regime between optical field trapping and millimetre-scale mechanical tweezers.
Access Nature and 54 other Nature Portfolio journals
Get Nature+, our best-value online-access subscription
$32.99 / 30 days
cancel any time
Subscribe to this journal
Receive 52 print issues and online access
$199.00 per year
only $3.83 per issue
Buy this article
- Purchase on SpringerLink
- Instant access to the full article PDF.
USD 39.95
Prices may be subject to local taxes which are calculated during checkout
 The alternative text for this image may have been generated using AI.
The alternative text for this image may have been generated using AI.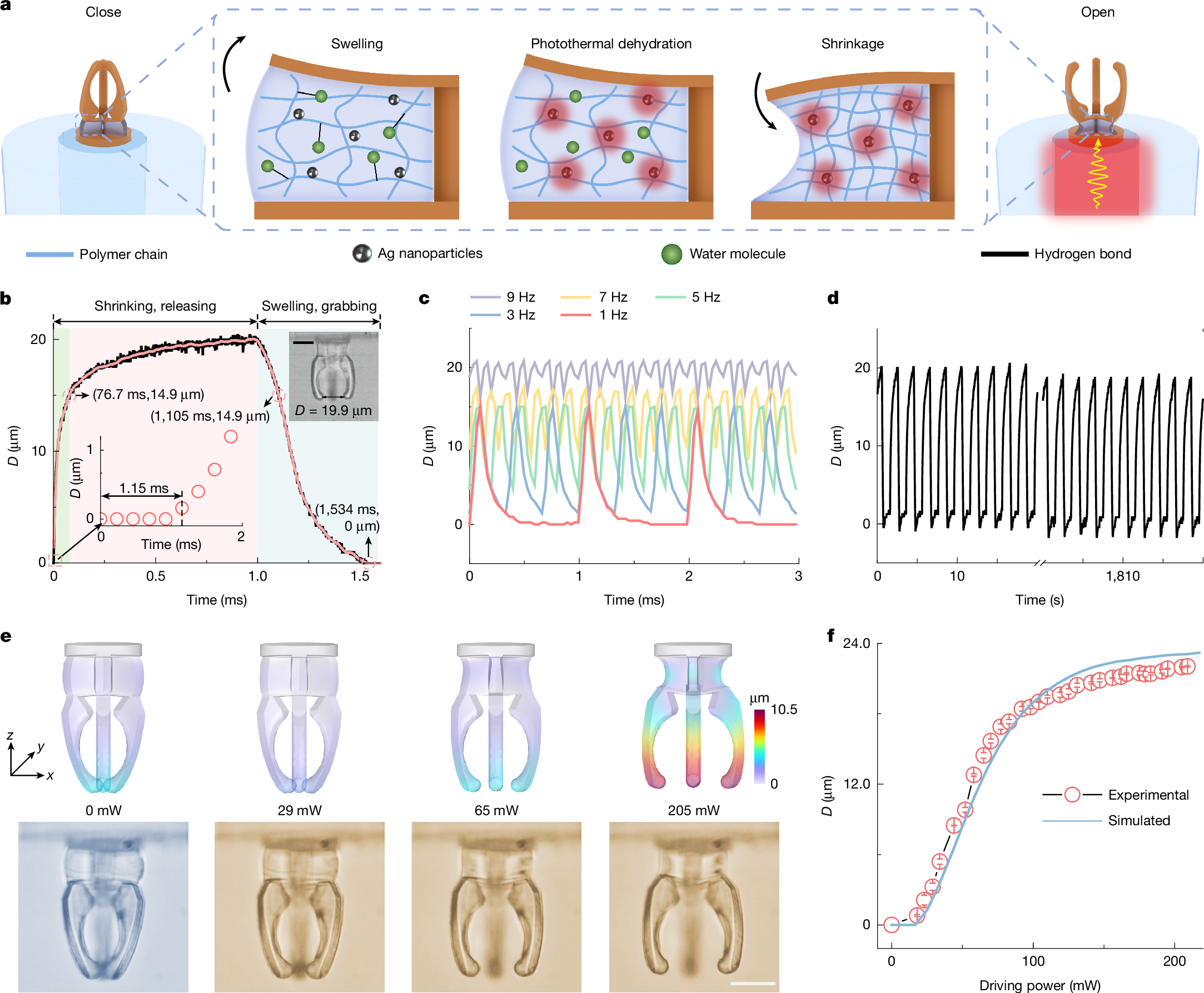 The alternative text for this image may have been generated using AI.
The alternative text for this image may have been generated using AI.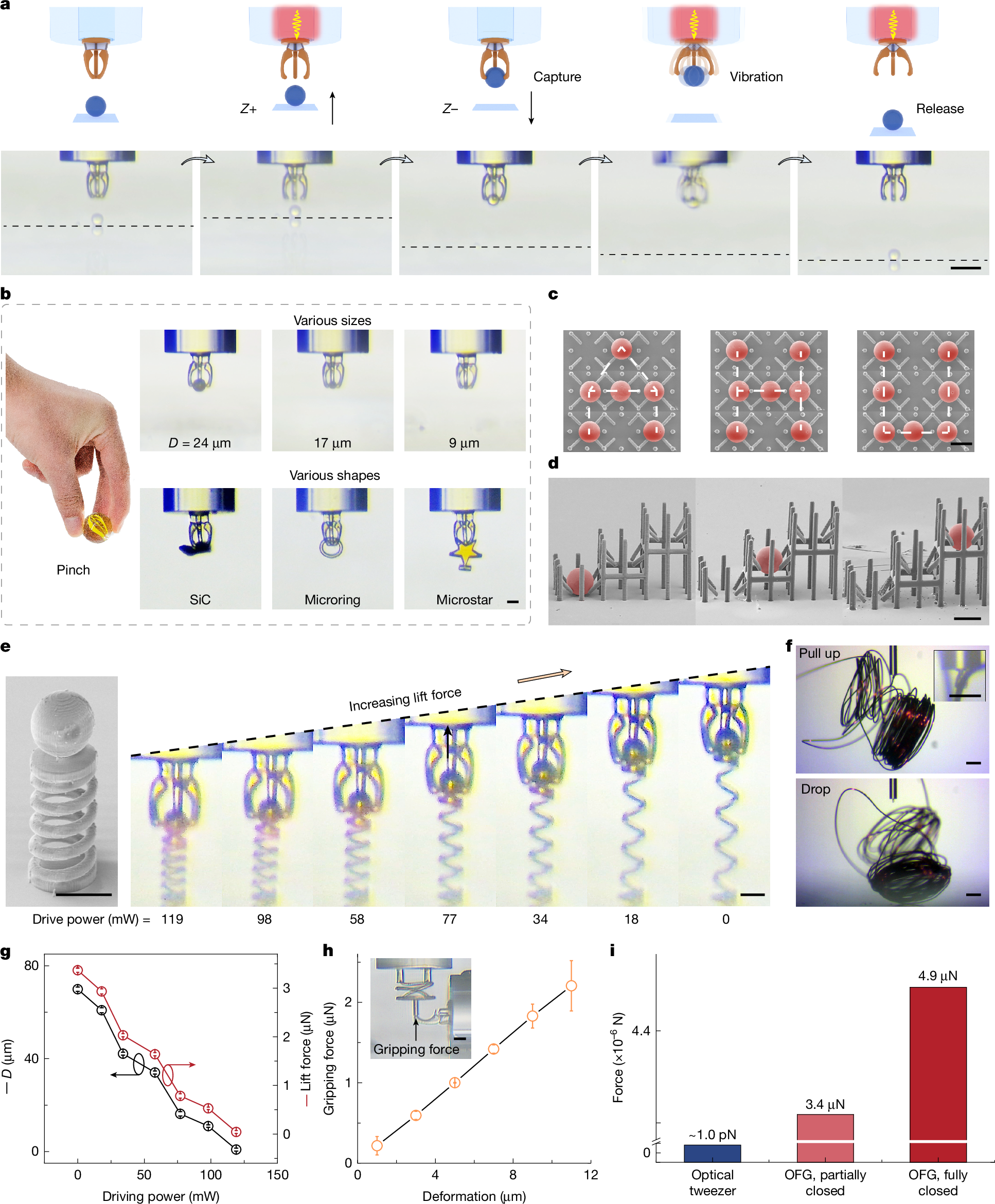 The alternative text for this image may have been generated using AI.
The alternative text for this image may have been generated using AI.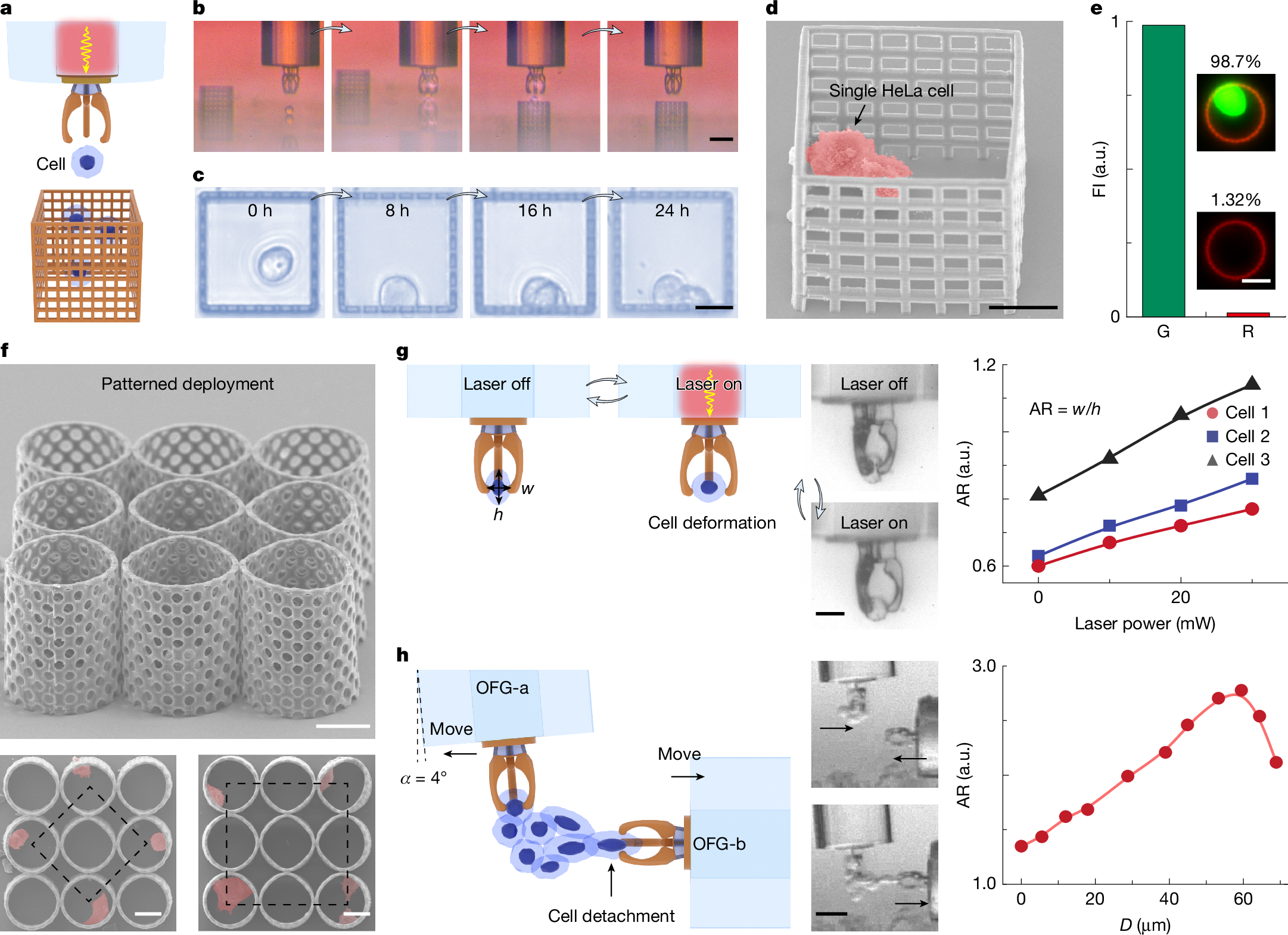 The alternative text for this image may have been generated using AI.
The alternative text for this image may have been generated using AI.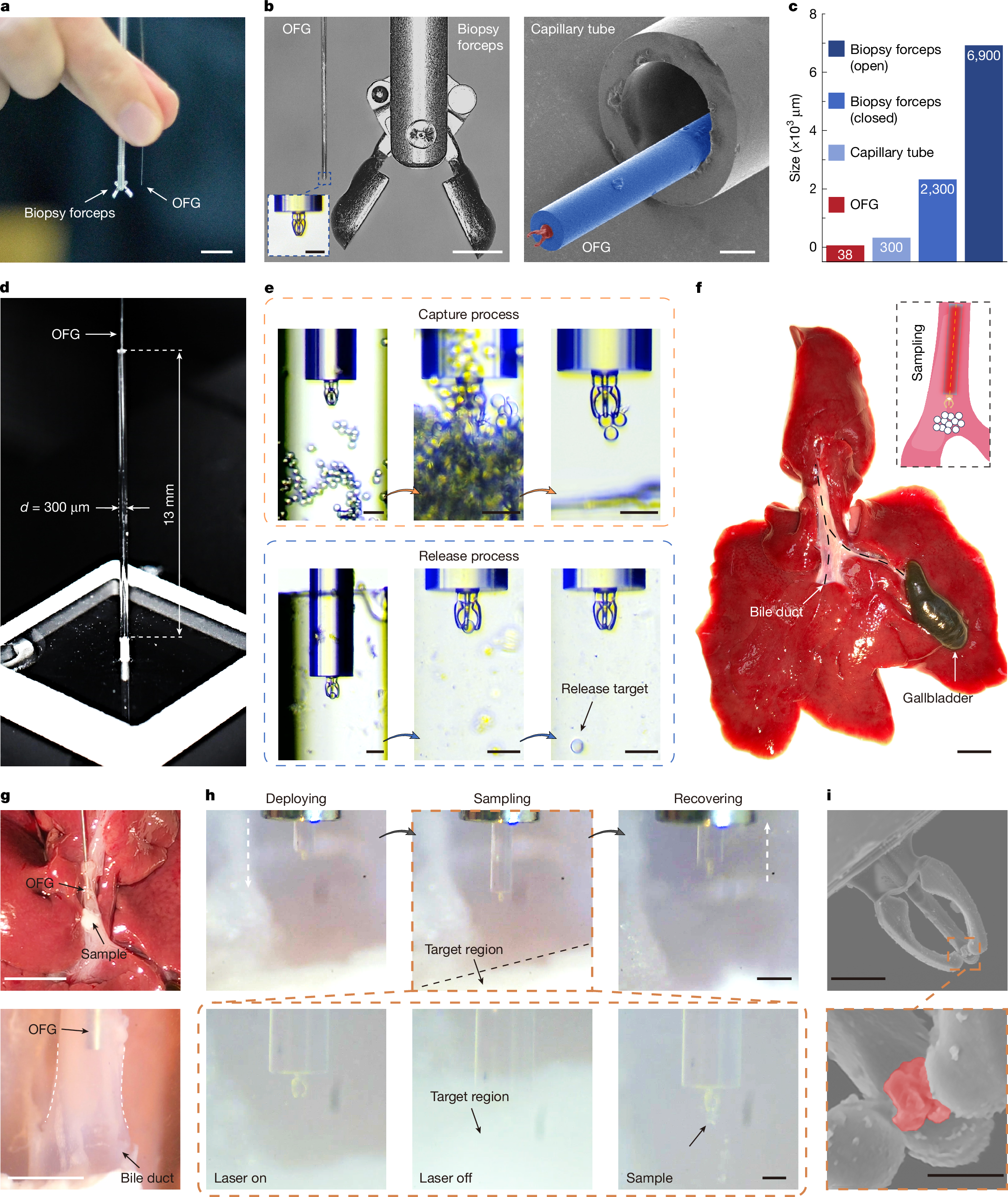 The alternative text for this image may have been generated using AI.
The alternative text for this image may have been generated using AI.Data availability
Source data are provided with this paper. All other data that support the findings of this study are available from the corresponding authors upon reasonable request.
References
Volpe, G. et al. Roadmap for optical tweezers. J. Phys. Photon. 5, 022501 (2023).
Zhang, H. & Liu, K.-K. Optical tweezers for single cells. J. R. Soc. Interface 5, 671–690 (2008).
Omine, R., Masui, S., Kadoya, S., Michihata, M. & Takahashi, S. Manipulation of large, irregular-shape particles using contour-tracking optical tweezers. Opt. Lett. 49, 2773–2776 (2024).
Bustamante, C. J., Chemla, Y. R., Liu, S. & Wang, M. D. Optical tweezers in single-molecule biophysics. Nat. Rev. Methods Primers 1, 25 (2021).
He, C. et al. Magnetically actuated dexterous tools for minimally invasive operation inside the brain. Sci. Robot. 10, eadk4249 (2025).