Spinal neuromotor rehabilitation using a portable isokinetic training robot
Abstract
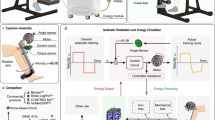
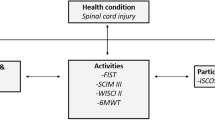
Most lower-extremity assistive robots are designed to actively assist gait1-7 without considering long-term neuromuscular adaptations8-11. In this study, we present a lightweight (0.96 kg) robot that administers isokinetic resistance training to sustain neuromuscular rehabilitation after removal. The device integrates a variable stiffness mechanism with a back-drivable damping motor to make available safe, portable, and customizable resistance training to juveniles with Spinal Muscular Atrophy (SMA) type II. In a study involving 6 such juvenile participants, significant improvements in lower-extremity motor ability were observed after 6 weeks of robot-assisted training in a clinical trial (NCT06648486). Participants gained the ability to perform sit-to-stand transitions with hands on knees but without external support from an average seated knee flexion angle of 111° to 104°, representing a 7° improvement from pre-intervention. This improvement was accompanied by significantly increased bilateral knee joint function (peak torque: +130%; range of motion: +51%; work: +97%). Significant physiological quadriceps muscle hypertrophy was observed (anatomical cross-sectional area: +12%; volume: +19%; physiological cross-sectional area: +21%) alongside enhanced femoral nerve conduction (compound muscle action potential: +19%), representing physiological changes consistent with the observed functional improvements. Importantly, participants were able to retain their gains after discontinuing isokinetic training and returning to their conventional physiotherapy routines. These results suggest that even temporary exposure to isokinetic resistance training through wearable robotics may facilitate enduring neuromuscular recovery.
Access Nature and 54 other Nature Portfolio journals
Get Nature+, our best-value online-access subscription
$32.99 / 30 days
cancel any time
Subscribe to this journal
Receive 52 print issues and online access
$199.00 per year
only $3.83 per issue
Prices may be subject to local taxes which are calculated during checkout
Similar content being viewed by others
Power-free knee rehabilitation robot for home-based isokinetic training

A multifaceted hybrid ES-robotic device for gait training in individuals with neurological disorders
Author information
These authors contributed equally: Yuebing Li, Jiaxin Ren, Tony Shu, Fuzhen Yuan, Yanggang Feng
Authors and Affiliations
School of Mechanical Engineering and Automation, Beihang University, Beijing, China
Yuebing Li, Jiaxin Ren & Yanggang Feng
Program in Media Arts and Sciences, MIT Media Lab, MIT, Cambridge, MA, USA
Tony Shu
Peking University Third Hospital, Beijing, China
Fuzhen Yuan
- Yuebing Li
Search author on:PubMed Google Scholar
- Jiaxin Ren
Search author on:PubMed Google Scholar
- Tony Shu
Search author on:PubMed Google Scholar
- Fuzhen Yuan
Search author on:PubMed Google Scholar
- Yanggang Feng
Search author on:PubMed Google Scholar
Corresponding author
Correspondence to Yanggang Feng.
Supplementary information
Supplementary Information (download PDF )
This file contains Supplementary Methods 1-17, Supplementary Notes 1-16, Supplementary Figures 1-38, Supplementary Tables 1-31 and Supplementary References.
Supplementary Video 1 (download MP4 )
Robot design and structure.